

“Nossa abordagem utiliza tecnologias de impressão 3D multimateriais comercialmente disponíveis e polímeros de memória de forma para criar atuadores macios em uma microescala que permitem controlar robôs macios muito pequenos, o que permite controle e delicadeza excepcionais.


“Nossa abordagem utiliza tecnologias de impressão 3D multimateriais comercialmente disponíveis e polímeros de memória de forma para criar atuadores macios em uma microescala que permitem controlar robôs macios muito pequenos, o que permite controle e delicadeza excepcionais. Pesquisadores da Universidade Estadual da Carolina do Norte demonstraram miniaturas de atuadores hidráulicos macios que podem ser usados para controlar a deformação e o movimento de robôs macios com menos de um milímetro de espessura. Os pesquisadores também demonstraram que essa técnica funciona com materiais de memória de forma, permitindo aos usuários bloquear repetidamente os robôs macios na forma desejada e retornar à forma original conforme necessário.
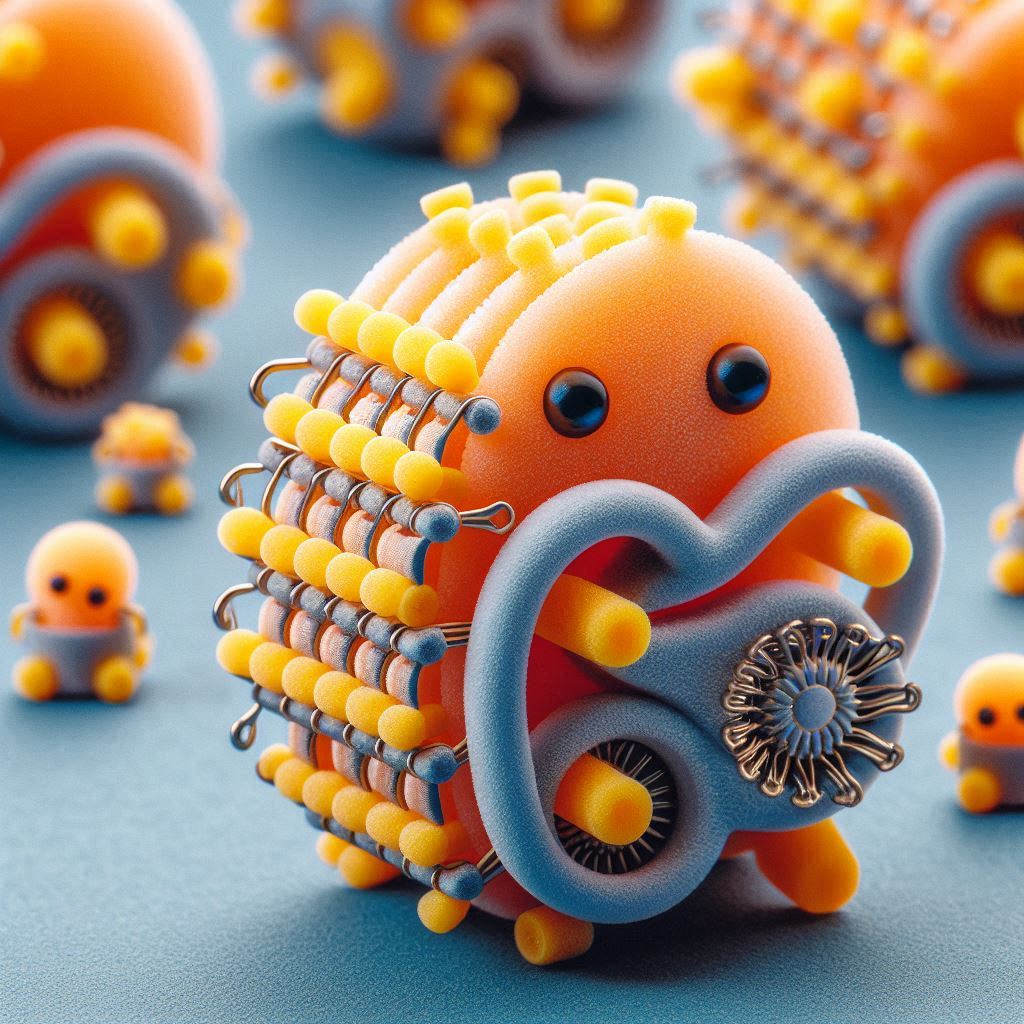
“A robótica macia é promissora para muitas aplicações, mas é desafiador projetar os atuadores que impulsionam o movimento de robôs macios em pequena escala”, diz Jie Yin, autor correspondente de um artigo sobre o trabalho e professor associado de engenharia mecânica e aeroespacial na NC State. ” A nova técnica consiste na criação de robôs macios compostos por duas camadas. A primeira camada é um polímero flexível criado com tecnologias de impressão 3D e incorpora um padrão de canais microfluídicos – essencialmente tubos muito pequenos passando pelo material. A segunda camada é um polímero flexível com memória de forma. No total, o robô macio tem apenas 0,8 milímetro de espessura. Ao bombear fluido para os canais microfluídicos, os usuários criam pressão hidráulica que força o robô macio a se mover e mudar de forma.
O padrão de canais microfluídicos controla o movimento e a mudança de forma do robô macio – seja dobrando, torcendo e assim por diante. Além disso, a quantidade de fluido sendo introduzida e a rapidez com que é introduzida controlam a rapidez com que o robô macio se move e a quantidade de força que ele exerce. Se os usuários desejam ‘congelar’ a forma do robô macio, eles podem aplicar calor moderado (64┬░C) e deixar o robô esfriar brevemente. Isso evita que o robô macio volte à sua forma original, mesmo depois que o líquido nos canais microfluídicos é bombeado para fora. Se os usuários quiserem retornar o robô macio à sua forma original, basta aplicar o calor novamente após bombear o líquido, e o robô relaxa para sua configuração original. “Um fator chave aqui é o ajuste fino da espessura da camada de memória de forma em relação à camada que contém os canais microfluídicos”, diz Yinding Chi, co-autor do artigo e ex-aluno de doutorado da NC State.
“É necessário que a camada de memória de forma seja fina o suficiente para dobrar quando a pressão do atuador é aplicada, mas grossa o suficiente para fazer o robô macio manter sua forma mesmo depois que a pressão for removida.” Para demonstrar a técnica, os pesquisadores criaram uma “pinça” robótica macia, capaz de pegar objetos pequenos. Os pesquisadores aplicaram pressão hidráulica, fazendo com que a pinça se fechasse em um objeto. Ao aplicar calor, os pesquisadores conseguiram fixar a pinça na posição “fechada”, mesmo após liberar a pressão do atuador hidráulico. A pinça poderia então ser movida – transportando o objeto que segurava – para uma nova posição. Em seguida, os pesquisadores aplicaram calor novamente, fazendo com que a pinça soltasse o objeto que havia pegado.
“Como esses robôs macios são tão finos, podemos aquecê-los até 64┬░C de forma rápida e fácil usando uma pequena fonte de luz infravermelha – e eles também esfriam muito rapidamente”, diz Haitao Qing, co-autor do artigo e doutorando na NC State. “Então toda essa série de operações leva apenas cerca de dois minutos.” “E o movimento não precisa ser uma pinça que aperta”. “Também demonstramos uma pinça inspirada em trepadeiras da natureza. Essas pinças rapidamente envolvem um objeto e o seguram com firmeza, permitindo uma pegada segura.” “Este artigo serve como uma prova de conceito para esta nova técnica, e estamos entusiasmados com as potenciais aplicações para esta classe de miniatuadores macios em robôs macios de pequena escala, máquinas metamorfas e engenharia biomédica.”

















© 2025 Comando Geral BG - Todos os direitos reservados.








